


























Introduction
When it comes to extracting features from the images, convolutional networks play a great role in it. It performs various tasks like image classification, image captioning, object detection, image segmentation, visual question answering, etc. While these models provide higher performance, they are difficult to grasp due to their lack of decomposability into individually intuitive components. You might have often gone through a situation where you cannot figure out why the model is not showing satisfactory results for your use case, which leads you to various speculations about the code, adversarial attack, model architecture, hyper-parameters, Dataset, etc.
Also Read About, Resnet 50 Architecture
Guided Backpropagation
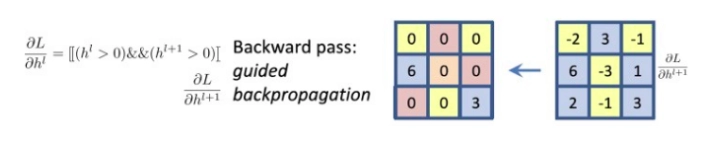
Guided Backpropagation is the combination of vanilla backpropagation at ReLUs and DeconvNets. ReLU is an activation function that deactivates the negative neurons. DeconvNets are simply the deconvolution and unpooling layers. We are only interested in knowing what image features the neuron detects. So when propagating the gradient, we set all the negative gradients to 0. We don’t care if a pixel “suppresses’’ (negative value) a neuron somewhere along the part to our neuron. Value in the filter map greater than zero signifies the pixel importance, which is overlapped with the input image to show which pixel from the input image contributed the most.
Working of Guided Backpropagation
RELU function during forward propagation.

RELU function during backward propagation.

Deconvolution for relu: The data having value greater than zero is flowing backward.

Guided backpropagation combining both backward propagation and deconvolution.
Implementation
Here is an implementation of a convolution neural network where we have used guided backward propagation that helps us to visualize fine-grained details in an image.
First, we will import all the necessary libraries that we are going to import to make a model.
|
#importing libraries import cv2 |
Now we will import an image and the last layer for VGG19 convolution network.
|
# setting the image path image = 'img.jpg' # setting the last conv layer for VGG19 Layer = 'block5_conv4' |
Loading the image
| img = tf.keras.preprocessing.image.load_img(image, target_size=(224, 224)) |
Displaying the original image.
|
plt.axis("off") plt.imshow(img) plt.show() |

Let us preprocess the image by using the VGG19’s preprocess function.
|
# converts PIL image to numpy array img = tf.keras.preprocessing.image.img_to_array(img) # expanding the shape of the img array x = np.expand_dims(img, axis=0) # preprocess numpy array encoding to a batch of images preprocessed_input = tf.keras.applications.vgg19.preprocess_input(x) |
Importing the VGG19 transfered learning model on the imagenet dataset.
| model = tf.keras.applications.vgg19.VGG19(weights='imagenet', include_top=True) |
We are creating a model until the last convolution layer from the imported VGG19 transferred learning model. When we use the fully connected layer in the deep learning CNN model, we lose the spatial information which is retained by convolution layers.
|
gb_model = tf.keras.models.Model( inputs = [model.inputs], outputs = [model.get_layer(Layer).output] ) layer_dict = [layer for layer in gb_model.layers[1:] if hasattr(layer,'activation')] |
Gradients of ReLU are overridden by applying @tf.custom_gradient that allows the fine-grained control over the gradients for backpropagating non-negative gradients to have a more efficient or numerically stable gradient.
|
@tf.custom_gradient def guidedRelu(a): def grad(dy): return tf.cast(dy>0,"float32") * tf.cast(a>0, "float32") * dy return tf.nn.relu(a), grad |
Applying the guided ReLU function to all the convolution layers wherever the activation function was ReLU.
|
for l in layer_d: if l.activation == tf.keras.activations.relu: l.activation = guidedRelu |
We will use the Gradient tape to record the processed input image during the forward pass and calculate the gradients for the backward pass. Basically it is used to capture the gradients of the final(last) convolution layer.
|
with tf.GradientTape() as tp: inputs = tf.cast(preprocessed_input, tf.float32) tp.watch(inputs) outputs = gb_model(inputs)[0] grads = tp.gradient(outputs,inputs)[0] |
Finally, visualizing the guided backpropagation.
|
#Visualizing the guided back prop gb_prop = grads guided_back_viz = np.dstack(( gb_prop[:, :, 0], gb_prop[:, :, 1], gb_prop[:, :, 2], )) guided_back_viz -= np.min(guided_back_viz) guided_back_viz /= guided_back_viz.max() imgplot = plt.imshow(guided_back_viz) plt.axis("off") plt.show() |

Here is an overall comparison of two images (input vs output).




 9+ registered
9+ registered 

