


























Introduction
A Microprogrammed Control Unit (MCU) is a type of control unit in a computer's central processing unit (CPU). Unlike hardwired control units, a microprogrammed control unit uses microinstructions stored in memory to control the execution of instructions.

Control unit can be implemented using two ways:-
1.) Hardwired control
2.) Microprogrammed control
The control unit is hardwired when the control signals are generated by hardware using conventional logic design methodologies.
In Microprogrammed Control Unit, the control information is stored in the control memory and is programmed to initiate the required sequence of micro-operations.
Before we learn about Microprogrammed Control Unit, we must be familiar with some basic terminologies.
Let’s get familiar with those terminologies without any delay.
What is Microprogrammed Control Unit?
A control unit whose binary control variables are stored in memory is known as a microprogrammed control unit.
In Microprogrammed Control, the control information is stored in the control memory and is programmed to initiate the required sequence of micro-operations.
By creating a definite collection of signals at each system clock beat, a controller generates the instructions to be executed. Each of these output signals causes a single micro-operation, such as register transfer. As a result, defined micro-operations that can be preserved in memory are formed from the sets of control signals.
Each bit in the microinstruction is connected to a single control signal. The control signal is active when its bit is set. The control signal becomes inactive when it is cleared. The internal control memory can store a sequence of these microinstructions. A microprogram-controlled computer's control unit is a computer within a computer.
The block diagram of a Microprogrammed Control Organization is shown below.
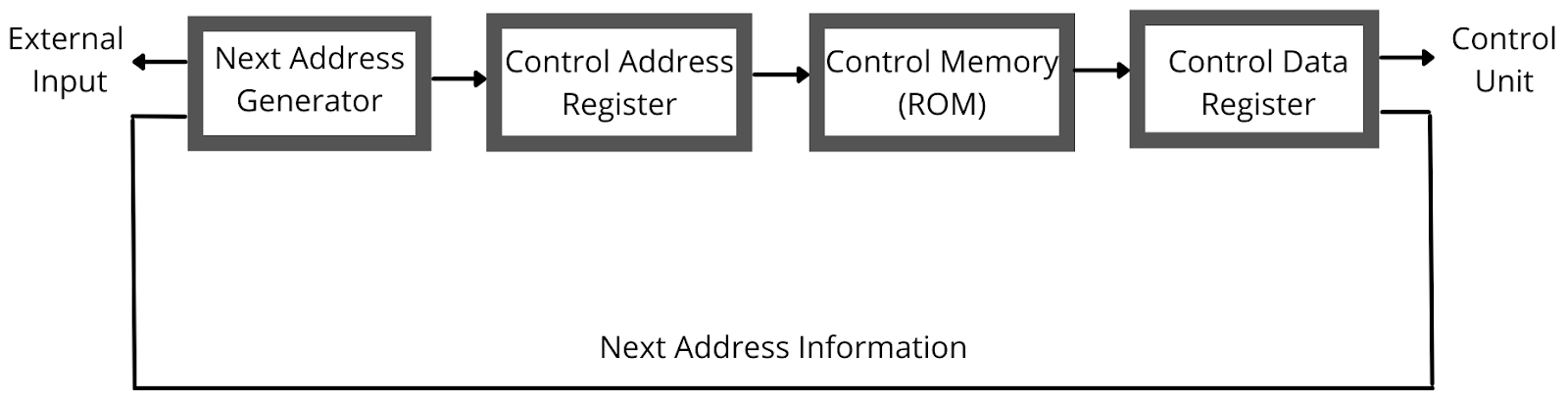
The microprogrammed control performs the following steps:-
1.) It can execute any instruction. It should be divided into a sequence of consecutive operations by the CPU. This set of operations is called microinstruction. The control signals are required for the sequential micro-operations to complete.
2.) Control signals saved in the ROM are created to execute the instructions on the data direction. These control signals can be used to control the micro-operations associated with a microinstruction at any time step.
3.) The following microinstruction address is generated.
4.) The last two steps are repeated till all of the microinstructions associated with the instruction in the set are executed.
The micro counter register generates the address supported by the control ROM. The micro counter obtains its inputs from a multiplexer that selects the output of an address ROM, a current address incrementer, and an address saved in the next address field of the current microinstruction.


 6+ registered
6+ registered 

