Implementation
Training an unstable GAN for generating handwritten digits
1. Mention the size of the latent space
latent_dim = 1
2. Import necessary libraries
from os import makedirs
from numpy import expand_dims
from numpy import zeros
from numpy import ones
from numpy.random import randn
from numpy.random import randint
from keras.datasets.mnist import load_data
from keras.optimizers import Adam
from keras.models import Sequential
from keras.layers import Dense
from keras.layers import Reshape
from keras.layers import Flatten
from keras.layers import Conv2D
from keras.layers import Conv2DTranspose
from keras.layers import LeakyReLU
from keras.initializers import RandomNormal
from matplotlib import pyplot
3. Building the discriminator model
def define_discriminator(in_shape=(28,28,1)):
# weight initialization
init = RandomNormal(stddev=0.02)
# define model
model = Sequential()
# downsample to 14x14
model.add(Conv2D(64, (4,4), strides=(2,2), padding='same', kernel_initializer=init, input_shape=in_shape))
model.add(LeakyReLU(alpha=0.2))
# downsample to 7x7
model.add(Conv2D(64, (4,4), strides=(2,2), padding='same', kernel_initializer=init))
model.add(LeakyReLU(alpha=0.2))
# classifier
model.add(Flatten())
model.add(Dense(1, activation='sigmoid'))
# compile model
opt = Adam(lr=0.0002, beta_1=0.5)
model.compile(loss='binary_crossentropy', optimizer=opt, metrics=['accuracy'])
return model
4. Building the generator model
def define_generator(latent_dim):
# weight initialization
init = RandomNormal(stddev=0.02)
# define model
model = Sequential()
# foundation for 7x7 image
n_nodes = 128 * 7 * 7
model.add(Dense(n_nodes, kernel_initializer=init, input_dim=latent_dim))
model.add(LeakyReLU(alpha=0.2))
model.add(Reshape((7, 7, 128)))
# upsample to 14x14
model.add(Conv2DTranspose(128, (4,4), strides=(2,2), padding='same', kernel_initializer=init))
model.add(LeakyReLU(alpha=0.2))
# upsample to 28x28
model.add(Conv2DTranspose(128, (4,4), strides=(2,2), padding='same', kernel_initializer=init))
model.add(LeakyReLU(alpha=0.2))
# output 28x28x1
model.add(Conv2D(1, (7,7), activation='tanh', padding='same', kernel_initializer=init))
return model
5. combine generator and discriminator model
def define_gan(generator, discriminator):
# make weights in the discriminator not trainable
discriminator.trainable = False
# connect them
model = Sequential()
# add generator
model.add(generator)
# add the discriminator
model.add(discriminator)
# compile model
opt = Adam(lr=0.0002, beta_1=0.5)
model.compile(loss='binary_crossentropy', optimizer=opt)
return model
6. You can use any data from an outside source, I am loading mnist images.
def load_real_samples():
# load dataset
(trainX, trainy), (_, _) = load_data()
# expand to 3d, e.g. add channels
X = expand_dims(trainX, axis=-1)
# select all of the examples for a given class
selected_ix = trainy == 8
X = X[selected_ix]
# convert from ints to floats
X = X.astype('float32')
# scale from [0,255] to [-1,1]
X = (X - 127.5) / 127.5
return X
7. Select the real samples
def generate_real_samples(dataset, n_samples):
# choose random instances
ix = randint(0, dataset.shape[0], n_samples)
# select images
X = dataset[ix]
# generate class labels
y = ones((n_samples, 1))
return X, y
8. Generate points in latent space as input for the generator
def generate_latent_points(latent_dim, n_samples):
# generate points in the latent space
x_input = randn(latent_dim * n_samples)
# reshape into a batch of inputs for the network
x_input = x_input.reshape(n_samples, latent_dim)
return x_input
9. Use the generator to generate n fake examples, with class labels
def generate_fake_samples(generator, latent_dim, n_samples):
# generate points in latent space
x_input = generate_latent_points(latent_dim, n_samples)
# predict outputs
X = generator.predict(x_input)
# create class labels
y = zeros((n_samples, 1))
return X, y
10. Generate samples and save as a plot and save the model
def summarize_performance(step, g_model, latent_dim, n_samples=100):
# prepare fake examples
X, _ = generate_fake_samples(g_model, latent_dim, n_samples)
# scale from [-1,1] to [0,1]
X = (X + 1) / 2.0
# plot images
for i in range(10 * 10):
# define subplot
pyplot.subplot(10, 10, 1 + i)
# turn off axis
pyplot.axis('off')
# plot raw pixel data
pyplot.imshow(X[i, :, :, 0], cmap='gray_r')
# save plot to file
pyplot.savefig('results_collapse/generated_plot_%03d.png' % (step+1))
pyplot.close()
# save the generator model
g_model.save('results_collapse/model_%03d.h5' % (step+1))
11. Create a line plot of loss for the gan and save to file
def plot_history(d1_hist, d2_hist, g_hist, a1_hist, a2_hist):
# plot loss
pyplot.subplot(2, 1, 1)
pyplot.plot(d1_hist, label='d-real')
pyplot.plot(d2_hist, label='d-fake')
pyplot.plot(g_hist, label='gen')
pyplot.legend()
# plot discriminator accuracy
pyplot.subplot(2, 1, 2)
pyplot.plot(a1_hist, label='acc-real')
pyplot.plot(a2_hist, label='acc-fake')
pyplot.legend()
# save plot to file
pyplot.savefig('results_collapse/plot_line_plot_loss.png')
pyplot.close()
12. Train the Generator and Discriminator
def train(g_model, d_model, gan_model, dataset, latent_dim, n_epochs=10, n_batch=128):
# calculate the number of batches per epoch
bat_per_epo = int(dataset.shape[0] / n_batch)
# calculate the total iterations based on batch and epoch
n_steps = bat_per_epo * n_epochs
# calculate the number of samples in half a batch
half_batch = int(n_batch / 2)
# prepare lists for storing stats each iteration
d1_hist, d2_hist, g_hist, a1_hist, a2_hist = list(), list(), list(), list(), list()
# manually enumerate epochs
for i in range(n_steps):
# get randomly selected 'real' samples
X_real, y_real = generate_real_samples(dataset, half_batch)
# update discriminator model weights
d_loss1, d_acc1 = d_model.train_on_batch(X_real, y_real)
# generate 'fake' examples
X_fake, y_fake = generate_fake_samples(g_model, latent_dim, half_batch)
# update discriminator model weights
d_loss2, d_acc2 = d_model.train_on_batch(X_fake, y_fake)
# prepare points in latent space as input for the generator
X_gan = generate_latent_points(latent_dim, n_batch)
# create inverted labels for the fake samples
y_gan = ones((n_batch, 1))
# update the generator via the discriminator's error
g_loss = gan_model.train_on_batch(X_gan, y_gan)
# summarize loss on this batch
print('>%d, d1=%.3f, d2=%.3f g=%.3f, a1=%d, a2=%d' %
(i+1, d_loss1, d_loss2, g_loss, int(100*d_acc1), int(100*d_acc2)))
# record history
d1_hist.append(d_loss1)
d2_hist.append(d_loss2)
g_hist.append(g_loss)
a1_hist.append(d_acc1)
a2_hist.append(d_acc2)
# evaluate the model performance every 'epoch'
if (i+1) % bat_per_epo == 0:
summarize_performance(i, g_model, latent_dim)
plot_history(d1_hist, d2_hist, g_hist, a1_hist, a2_hist)
13. Make folder for results and create the models
makedirs('results_collapse', exist_ok=True)
latent_dim = 1
discriminator = define_discriminator()
generator = define_generator(latent_dim)
gan_model = define_gan(generator, discriminator)
dataset = load_real_samples()
print(dataset.shape)
14. Train the model
train(generator, discriminator, gan_model, dataset, latent_dim)
Output

Line plot for loss and accuracy of GAN With a convergence failure due to lot of Aggressive Optimisation
FAQs
-
What is convergence failure in a generative adversarial network?
A failure to converge means not finding an equilibrium between the discriminator and the generator.
-
What happens to the generator at the convergence failure?
The generator is expected to produce highly low-quality images identified as fake by the discriminator.
-
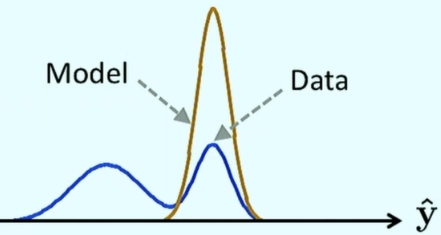
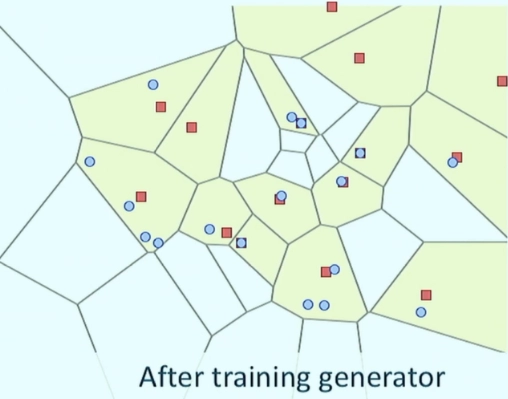
How can we identify model collapse in GANs?
The generator model is expected to generate identical output images from different points in the latent space
-
What are the ways to impair the stable GAN?
Changing the Adam optimization algorithm to be too aggressive
Using very large or petite kernel sizes in the models.
-
Which part of machine learning is a generative adversarial network?
Unsupervised learning
Key Takeaways
In this tutorial, we looked at the model collapse in generative adversarial networks and how to tackle it along with the code implementation. Visit Machine Learning to explore more about similar exciting models.
Further readings-
Face Detection
N-Gram Modelling
Rolling and Unrolling RNN

































 8+ registered
8+ registered 

