



























The graph has no self-edges, no parallel edges.
The graph may not be connected.
If ‘N’ = 7, ‘M’ = 5, ‘SOURCE’ = 1, ‘DESTINATION’ = 5, EDGES = [ [2, 4], [2, 5],[3, 5],[3, 6],[4, 5] ].
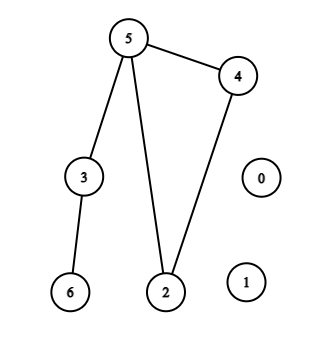
Here, you can see that the graph is not connected and there is no way we can reach node 5 from node 1 as they both are in different connected components. Hence, the output is “No”.
The first line of input contains an integer ‘T’ denoting the number of test cases. then ‘T’ test cases follow.
The first line of each test case consists of four space-separated integers ‘N’, ‘M’, ‘SOURCE’, ‘DESTINATION’, described in the problem statement.
Then next ‘M’ lines follow in each test case. The ith line consists of two space-separated integers ‘EDGES[i][0]’ and ‘EDGES[i][1]’ representing that there is a undirected edge between nodes ‘EDGES[i][0]’ and ‘EDGES[i][1]’.
For each test case, print the “Yes” if there exists a path from node ‘SOURCE’ to node ‘DESTINATION’ by moving along the edges of the graph, Otherwise, print “No”.
Print a separate line for each test case.
You do not need to print anything, it has already been taken care of. Just implement the given function.
1 <= T <= 10
1 <= N <= 500
1 <= M <= (N*(N-1)) / 2
0 <= ‘SOURCE’, ‘DESTINATION’ <= N - 1
Time limit: 1 sec
Let’s first define a function canReach(node, x, adj, vis) where “node” is the current node we are at, ‘x’ is the destination node which we have to find, “adj” is the adjacency list of all the nodes, adjacency list stores all the nodes which are directly connected to the ith node, “vis” is the vector which keeps track of every node whether it has been traversed or not. If vis[node] = 1, means we have traversed this node, otherwise not.
This function returns “true” if ‘x’ is found otherwise it returns false. So, the idea is to start from the source node and try to find ‘x’ over all possible paths. After reaching a certain node we will check whether this node is equal to the ‘x’ or not, if yes then return “true”, otherwise traverse the adjacency list of the current node and call the “canReach” function for the nodes which are not visited yet.
The idea of this approach is to traverse the graph in level order starting from the “source” node and explore all the neighboring nodes. Then, we will select the nearest node which has not been visited yet and explore all the unexplored nodes. For the implementation of this approach we will be using a data-structure “queue” as we want level order traversal so if a node ‘x' enters before a node “y” in the queue then “x” will be processed before “y”.
We first push the node “source” in the queue then we will do the above-mentioned process until we find the “destination” node or we have traversed the whole component of the graph connected to the “source” node.
Here is the algorithm:
Longest Substring with K-Repeating Characters
Expression Add Operators
Gray Code Transformation
Count of Subsequences with Given Sum
Distinct Integers After Zero Removal

